在双目视觉中,标定摄像机是一个非常重要的步骤。本文将展示如何用Python和OpenCV对双目相机进行标定。
”双目摄像头标定 python“ 的搜索结果
这是因为双目摄像头的标定需要知道每个摄像头的内部参数(如相机矩阵、畸变系数)以及相机之间的外部参数(相对位置和朝向)。:通过将相机放置在不同位置或拍摄不同方向的图像,使用外参标定算法来估计相机的位置和...

双目摄像头标定拍照源码
标签: 摄像头标定
该代码利用opencv3.2+Python3.5实现了双摄像头视频实时显示与拼接——方便双摄像头的安装调试,还实现了当按下键盘K键时左右摄像头同时拍照并保存。


一款摄像头的双目测距程序,包含了标定用图以及标定数据,使用Matlab标定工具箱标定 包含两种像素的不同代码及标定图片与结果 运行 当想使用摄像头拍照时,请使用 python cap.py 当拍照完成后,使用MATLAB工具箱标定...



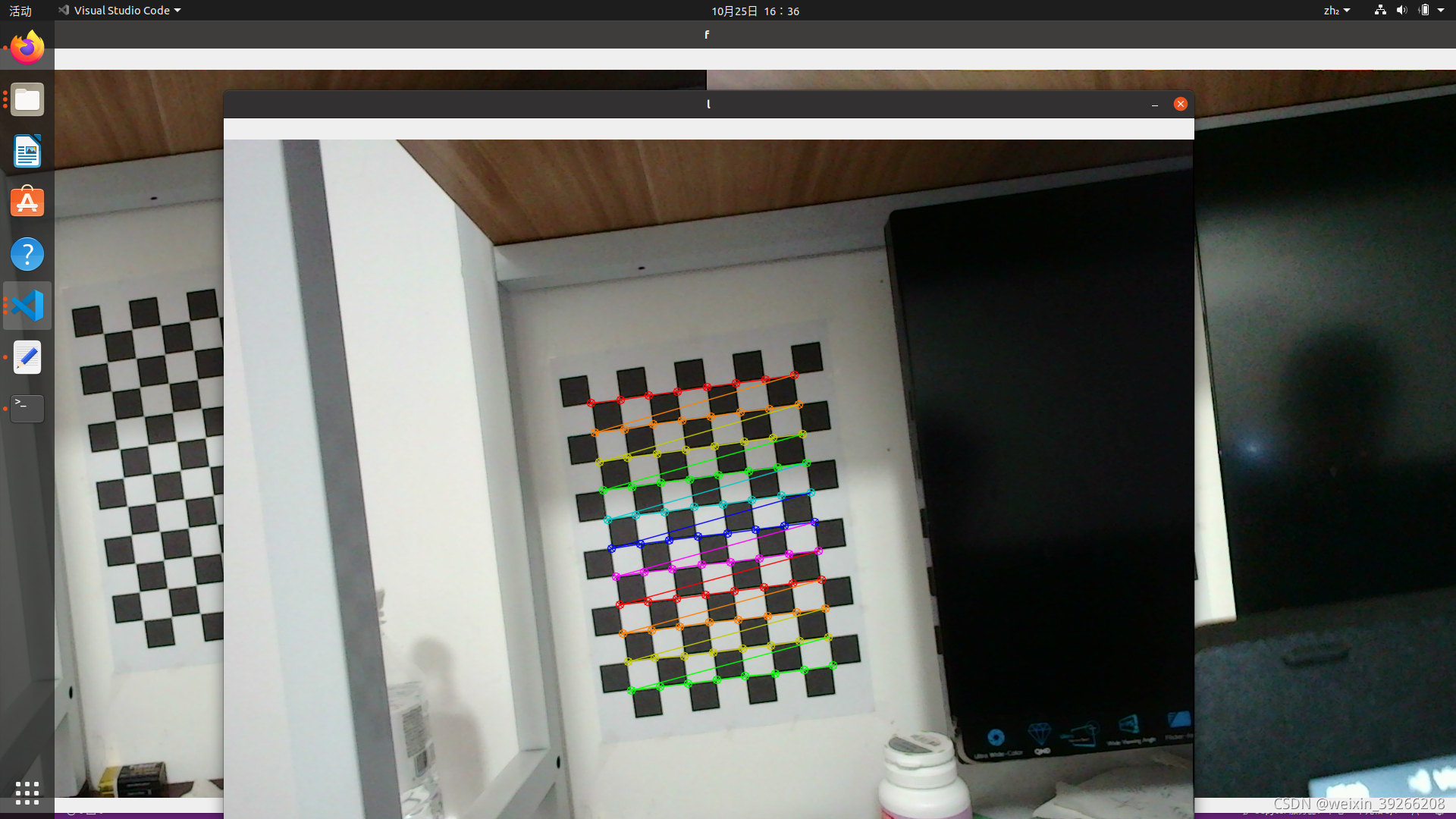
在Python中进行双目摄像头标定的步骤如下: 1. 收集标定图像:使用双目摄像头拍摄一系列的标定图像,确保每张图像都包含一些棋盘格子。 2. 检测角点:使用OpenCV的函数`findChessboardCorners()`来检测图像中的...


双目摄像头标定和数据
标签: python

第四步、主角—双目摄像头 奉劝大家不要贪小便宜哈,得买个一百来块的,要不然数据极度不准确,而且还难用 我买了这个,150 第五步、测试双目摄像头 打开你们可爱的pycharm 安装opencv 写入代码 import cv2 ...

3,在进行测距之前,首先需要对摄像头进行标定,那么如何标定呢? 在stdafx.h中把"#define CALIBRATION 0"改成 “#define CALIBRATION 1”表示进行标定,标定之后,你就可以在工程目录下的"CalibFile" 文件夹中得到...
Android双目三维重建:Android双目摄像头实现双目测距 Android实现双目测距,Android双目三维重建,opencv三维重建,opencv双目测距
前言:基于Python版本的相机校正,并且校正结果与官方对比主要差值较小。话不多说,直接上代码。 1.导入库 包括opencv, numpy和文件操作库os import cv2 import numpy as np import os 2.编写函数 本次主要有...

淘宝看到一款很便宜的双目,150元,就买了。想着用它学习一下opencv,好换个...这个双目摄像头用win10自带的摄像头驱动可以完美的打开,支持它的各种比例和分辨率的视频显示。分辨率支持以下几种:16:9 1280x7204:3 ...


推荐文章
- Ubuntu/linux下下载工具_ubuntu下载软件助手 linux版本-程序员宅基地
- HTML、JSP前端页面国际化(i18n)_html全局国际化-程序员宅基地
- Python高级-08-正则表达式_写出能够匹配只有下划线和数字还有字母组成(且第一个字符必须为字母)的163邮箱(@1-程序员宅基地
- 寻仙手游维护公告服务器停服更新,寻仙手游2月1日停服更新公告 2月1日更新了什么...-程序员宅基地
- 用python自动预约图书馆座位_微信图书馆座位秒抢脚本-程序员宅基地
- Android真机或模拟器激活Xposed框架的方法_de.robv.android.xposed.installer-程序员宅基地
- 操作系统为什么要分用户态和内核态_用户态和内核态都需要cpu参与,为什么要区分-程序员宅基地
- 01—JVM与Java体系结构(简单介绍)_01_jvm与java体系结构.pptx-程序员宅基地
- 国有建筑企业数字化转型整体解决方案_建筑企业数字化转型行动方案-程序员宅基地
- 性能测试的软件------loadrunner_loadrunner有有三个图标,-程序员宅基地